|
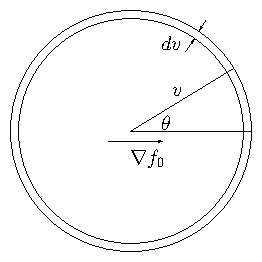
Integration over a spherical velocity element with
μ = cosθ and the angle θ measured from the
direction ∇f0. |
If we substitute into eq. (9.1) and equate orders of μ, ignoring the partial time derivative (since we presume the distribution in angle relaxes quickly), we then obtain at order μ
|
|
|
|