Chapter 2
Motion of Charged Particles in Fields
Plasmas are complicated because motions of electrons and
ions are determined by the electric and magnetic fields but
also change the fields by the currents they carry.
For now we shall ignore the second part of the problem
and assume that Fields are Prescribed.
Even so, calculating the motion of a charged particle can be
quite hard.
Equation of motion:
|
|
Rate of change of momentum
|
= |
q
charge
|
( |
E
E−field
|
+ |
v
velocity
|
∧ |
B
B−field
|
) |
Lorentz Force
|
|
| (2.1) |
Have to solve this differential equation, to get position
r and velocity (v= · r) given
E(r,t), B(r,t).
Approach here: Start simple, gradually generalize. For a more
sophisticated demonstration that the simple results are comprehensive
see http://silas.psfc.mit.edu/introplasma/drifts.pdf.
2.1 Uniform B field, E
= 0.
2.1.1 Qualitatively
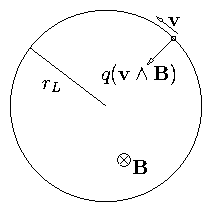
in the plane perpendicular to B:
Figure 2.1: Circular orbit in uniform magnetic field.
Accel. is perp to v so particle moves in a circle
whose radius rL is such as to satisfy
|
m rL Ω2 = m |
v⊥2
rL
|
= |q |v⊥ B |
| (2.3) |
Ω is the angular (velocity) frequency
1st equality shows Ω2 = v⊥2 /rL2 (rL = v⊥ / Ω)
Hence second gives m v⊥ Ω = |q |v⊥ B
Particle moves in a circular orbit with
|
angular frequency Ω = |
|q |B
m
|
the "Cyclotron Frequency" |
| (2.5) |
|
and radius rl = |
v⊥
Ω
|
the "Larmor Radius. |
| (2.6) |
2.1.2 By Vector Algebra
- Particle Energy is constant. proof: take v. Eq. of
motion then
|
m v. |
⋅
v
|
= |
d
dt
|
| ⎛
⎝
|
1
2
|
m v2 | ⎞
⎠
|
= q v. (v∧B) = 0 . |
| (2.7) |
- Parallel and Perpendicular motions separate. v|| =
constant because accel ( ∝ v∧B) is
perpendicular to B.
Perpendicular Dynamics:
Take B in ∧z direction and write components
|
m |
⋅
v
|
x
|
= q vy B , m |
⋅
v
|
y
|
= − q vx B |
| (2.8) |
Hence
|
|
⋅⋅
v
|
x
|
= |
qB
m
|
|
⋅
v
|
y
|
= − | ⎛
⎝
|
qB
m
| ⎞
⎠
|
2
|
vx = − Ω2 vx |
| (2.9) |
Solution: vx = v⊥ cosΩt (choose zero of
time)
Substitute back:
|
vy = |
m
qB
|
|
⋅
v
|
x
|
= − |
|q |
q
|
v⊥ sinΩt |
| (2.10) |
Integrate:
|
x = x0 + |
v⊥
Ω
|
sinΩt , y = y0 + |
q
|q |
|
|
v⊥
Ω
|
cosΩt |
| (2.11) |
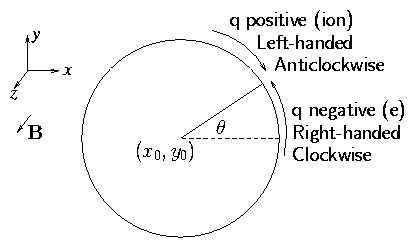
Figure 2.2: Gyro center (x0,y0) and
orbit projection viewed from positive z.
This is the equation of a circle with center
r0 = (x0, y0) and radius rL = v⊥/ Ω:
Gyro Radius.
[Angle is θ = Ωt]
Direction of rotation is as indicated in Fig. 2.2 for opposite
sign of charge:
Ions rotate anticlockwise. Electrons clockwise
about the magnetic field.
The current carried by the plasma always is in such a
direction as to reduce the magnetic field.
This is the property of a magnetic material which is
"Diamagnetic".
When v|| is non-zero the total motion is along a helix.
2.2 Uniform B and non-zero E
Parallel motion: Before, when E
= 0 this was
v|| = const. Now it is clearly
Constant acceleration along the field.
Perpendicular Motion
Qualitatively:
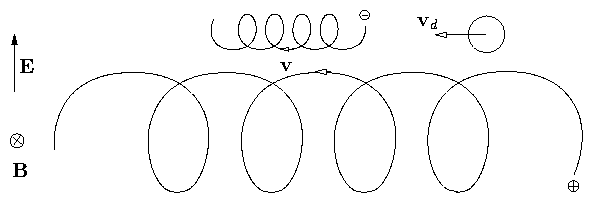
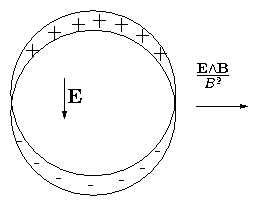
Figure 2.3: E∧B drift orbit
Speed of positive particle is greater at top than bottom
so radius of curvature is greater. See Fig. 2.3. Result is that
guiding center moves perpendicular to both E and B. It `drifts' across the field.
Algebraically: It is clear that if we can find a constant
velocity vd that satisfies
then the sum of this drift velocity plus the velocity
which
we calculated for the E
= 0 gyration will satisfy the
equation of motion.
Take ∧B the above equation:
|
0 = E∧B+ (vd ∧B) ∧B=E∧B+ (vd . B) B− B2 vd |
| (2.16) |
so that
does satisfy it.
Hence the full solution is
|
v= |
v||
parallel
|
+ |
vd
cross−field drift
|
+ |
vL
Gyration
|
|
| (2.18) |
where
and
vd (eq 2.17) is the "E × B drift"
of the gyrocenter.
Comments on E × B drift:
- It is independent of the properties of the
drifting particle (q, m, v, whatever).
- Hence it is in the same direction for electrons
and ions.
- Underlying physics for this is that in the frame moving
at the E × B drift E = 0. We have `transformed
away' the electric field.
- Formula given above is exact except for the fact that
relativistic effects have been ignored. They would be
important if vd ∼ c.
2.2.1 Drift due to Gravity or other Forces
Suppose particle is subject to some other force, such as gravity.
Write it F so that
|
m |
⋅
v
|
= F + q v∧B
= q ( |
1
q
|
F+ v∧B) |
| (2.20) |
This is just like the Electric field case except with F/q replacing E.
The drift is therefore
In this case, if force on electrons and ions is same, they drift
in opposite directions.
This general formula can be used to get the drift velocity
in some other cases of interest (see later).
2.3 Non-Uniform B Field
If B-lines are straight but the magnitude of B varies in
space we get orbits that look qualitatively similar to
the E ⊥ B case:
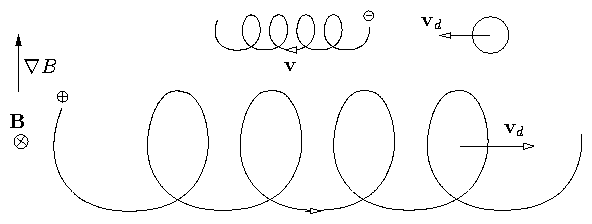
Figure 2.4: ∇B drift orbit
Curvature of orbit is greater where B is greater causing
loop to be small on that side. Result is a drift perpendicular
to both B and ∇B. Notice, though, that
electrons and ions go in opposite directions
(unlike E∧B).
Algebra
We try to find a decomposition of the velocity as
before into v
= vd + vL where vd is constant.
We shall find that this can be done only approximately.
Also we must have a simple expression for B. This we
get by assuming that the Larmor radius is much smaller
than the scale length of B variation i.e.,
in which case we can express the field approximately as the first
two terms in a Taylor expansion:
Then substituting the decomposed velocity we get:
| |
|
|
m |
⋅
v
|
L
|
= q (v∧B) = q [ vL ∧B0 + vd ∧B0 + (vL + vd) ∧(r. ∇) B] |
| | (2.24) |
| |
|
| vd ∧B0 + vL ∧(r. ∇ ) B+ vd ∧(r. ∇) B
|
| | (2.25) |
|
Now we shall find that vd/vL is also small, like
r| ∇B | /B. Therefore the last term here
is second order but the first two are first order. So we
drop the last term.
Now the awkward part is that vL and rL are
periodic. Substitute r
= rc + rL where rc is the
center of the orbit (gyrocenter), the nonperiodic part; then
|
0 = vd ∧B0 + vL ∧(rL . ∇ ) B+ vL ∧( rc . ∇ ) B |
| (2.26) |
We now average over a cyclotron period. The last term is
∝ e−iΩt so it averages to zero:
|
0 = vd ∧B+ 〈vL ∧(rL . ∇ ) B〉 . |
| (2.27) |
To perform the average use
| |
|
|
|
v⊥
Ω
|
| ⎛
⎝
|
sinΩt , |
q
|q |
|
cosΩt | ⎞
⎠
|
|
| | (2.28) |
| |
|
|
v⊥ | ⎛
⎝
|
cosΩt , |
−q
|q |
|
sinΩt | ⎞
⎠
|
|
| | (2.29) |
| |
|
| | (2.30) |
| |
|
| | (2.31) |
|
taking ∇B to be in the y-direction.
Then
| |
|
|
− 〈cosΩt sinΩt 〉 |
v⊥2
Ω
|
= 0 |
| | (2.32) |
| |
|
|
q
|q |
|
〈cosΩt cosΩt 〉 |
v⊥2
Ω
|
= |
1
2
|
|
v⊥2
Ω
|
|
q
|q |
|
|
| | (2.33) |
|
So
|
〈vL ∧(r. ∇ ) B〉 = − |
q
|q |
|
|
1
2
|
|
v⊥2
Ω
|
∇ B |
| (2.34) |
Substitute in:
|
0 = vd ∧B− |
q
|q |
|
|
v⊥2
2Ω
|
∇ B |
| (2.35) |
and solve as before to get
|
vd = |
|
| ⎛
⎝
|
−q
|q |
|
|
v⊥2
2 Ω
|
∇ B | ⎞
⎠
|
∧B |
B2
|
= |
q
|q |
|
|
v⊥2
2 Ω
|
|
B∧∇ B
B2
|
|
| (2.36) |
or equivalently
|
vd = |
1
q
|
|
mv⊥2
2 B
|
|
B∧∇ B
B2
|
|
| (2.37) |
This is called the `Grad B drift'.
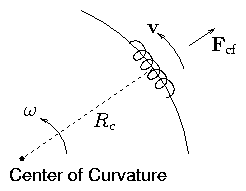
2.4 Curvature Drift
When the B-field lines are curved and the particle has a velocity
v|| along the field, another drift occurs.
Figure 2.5: Curvature and Centrifugal Force
Take |B| constant; radius of curvature Rc.
To 1st order the particle just spirals along the field.
In the frame of the guiding center a force appears because the plasma
is rotating about the center of curvature.
This centrifugal force is Fcf
|
Fcf = m |
v||2
Rc
|
pointing outward |
| (2.38) |
as a vector
[There is also a coriolis force 2m(ω ∧v)
but this averages to zero over a gyroperiod.]
Use the previous formula for a force
|
vd = |
1
q
|
|
Fcf ∧B
B2
|
= |
m v||2
q B2
|
|
Rc ∧B
Rc2
|
|
| (2.40) |
This is the "Curvature Drift".
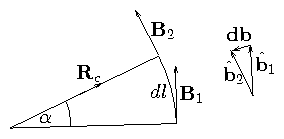
It is often convenient to have this expressed in terms of the field
gradients. So we relate Rc to ∇B etc. as follows:
Figure 2.6: Differential expression of curvature
(Carets denote unit vectors)
From the diagram
|
db = |
^
b
|
2
|
− |
^
b
|
1
|
= − |
^
R
|
c
|
α |
| (2.41) |
and
So
|
|
d b
d l
|
= − |
Rc
|
= − |
Rc
Rc2
|
|
| (2.43) |
But (by definition)
|
|
d b
d l
|
= ( |
^
b
|
. ∇ ) |
^
b
|
|
| (2.44) |
So the curvature drift can be written
|
vd = |
m v||2
q
|
|
Rc
Rc2
|
∧ |
B
B2
|
= |
mv||2
q
|
|
B2
|
|
| (2.45) |
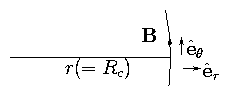
2.4.1 Vacuum Fields
Relation between ∇ B &
Rc drifts
The curvature and ∇B are related because of Maxwell's
equations,
their relation depends on the current density j. A particular
case of interest is j=0: vacuum fields.
Figure 2.7: Local polar coordinates in a vacuum field
Consider the z-component
| |
|
|
|
1
r
|
|
∂
∂r
|
(r Bθ ) (Br = 0 by choice). |
| | (2.47) |
| |
|
| | (2.48) |
|
or, in other words,
[Note also 0 = (∇ ∧B)θ = ∂Bθ/∂z : (∇ B )z = 0]
and hence (∇ B)perp = − B Rc/Rc2.
Thus the grad B drift can be written:
|
v∇B = |
mv⊥2
2 q
|
|
B∧∇ B
B3
|
= |
mv⊥2
2 q
|
|
Rc ∧B
Rc2 B2
|
|
| (2.50) |
and the total drift across a vacuum field becomes
|
vR + v∇B = |
1
q
|
| ⎛
⎝
|
mv||2 + |
1
2
|
mv⊥2 | ⎞
⎠
|
|
Rc ∧B
Rc2 B2
|
. |
| (2.51) |
Notice the following:
- Rc & ∇B drifts are in the same direction.
- They are in opposite directions for opposite charges.
- They are proportional to particle energies
- Curvature ↔ Parallel Energy (× 2)
∇B ↔ Perpendicular Energy
- As a result one can very quickly calculate the average drift
over a thermal distribution of particles because
Therefore
|
〈vR + v∇B 〉 = |
2T
q
|
|
Rc ∧B
Rc2 B2
|
| ⎛
⎜
⎝
|
= |
2T
q
|
|
B2
| ⎞
⎟
⎠
|
|
| (2.54) |
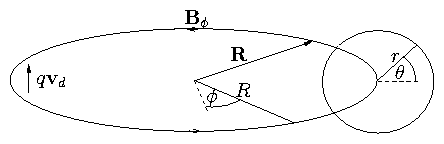
2.5 Interlude: Toroidal Confinement of Single Particles
Since particles can move freely along a magnetic field even if not
across it, we cannot obviously confine the particles in a straight
magnetic field. Obvious idea: bend the field lines into circles
so that they have no ends.
Figure 2.8: Toroidal field geometry
Problem
Curvature & ∇B drifts
| |
|
|
|
1
q
|
| ⎛
⎝
|
mv||2 + |
1
2
|
mv⊥2 | ⎞
⎠
|
|
R ∧B
R2 B2
|
|
| | (2.55) |
| |
|
|
1
q
|
| ⎛
⎝
|
mv||2 + |
1
2
|
mv⊥2 | ⎞
⎠
|
|
1
BR
|
|
| | (2.56) |
|
Figure 2.9: Charge separation due to vertical drift
Ions drift up. Electrons down. There is no confinement.
When there is finite density things are even worse because
charge separation occurs → E →
E ∧B → Outward Motion.
2.5.1 How to solve this problem?
Consider a beam of electrons v|| ≠ 0 v⊥ = 0.
Drift is
What Bz is required to cancel this?
Adding Bz gives a compensating vertical velocity
|
v = v|| |
Bz
BT
|
for Bz << BT |
| (2.58) |
We want total
|
vz = 0 = v|| |
Bz
BT
|
+ |
mv||2
q
|
|
1
BTR
|
|
| (2.59) |
So Bz = − mv||/ Rq
is the right amount of field.
Note that this is such as to make
|
rL (Bz) = |
|mv|| |
|q Bz |
|
= R . |
| (2.60) |
But Bz required depends on v|| and q so we can't
compensate for all particles simultaneously.
Vertical field alone cannot do it.
2.5.2 The Solution: Rotational Transform
Figure 2.10: Tokamak field lines with rotational transform
Toroidal Coordinate system (r, θ, ϕ)
(minor radius, poloidal angle, toroidal angle), see figure 2.8.
Suppose we have a poloidal field Bθ
Field Lines become helical and wind around the torus: figure 2.10.
In the poloidal cross-section the field describes a
circle as it goes round in ϕ.
Equation of motion of a particle exactly following
the field is:
|
r |
d θ
dt
|
= |
Bθ
Bϕ
|
vϕ = |
Bθ
Bϕ
|
|
Bϕ
B
|
v|| = |
Bθ
B
|
v|| |
| (2.61) |
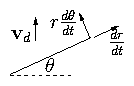
and
Now add on to this motion the cross field drift in the
∧z direction.
Figure 2.11: Components of velocity
Take ratio, to eliminate time:
Take Bθ, B, v||, vd to be constants, then we
can integrate this orbit equation:
|
[ lnr ] = [ − ln| |
Bθ v||
B
|
+ vd cosθ|] . |
| (2.66) |
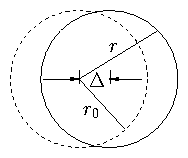
Take r = r0 when cosθ = 0 (θ = [( π)/2])
then
|
r = r0 / | ⎡
⎣
|
1 + |
Bvd
Bθ v||
|
cosθ | ⎤
⎦
|
|
| (2.67) |
If [( Bvd)/(Bθ v|| )] << 1 this is approximately
where ∆ = [(Bvd)/(Bθ v|| )] r0
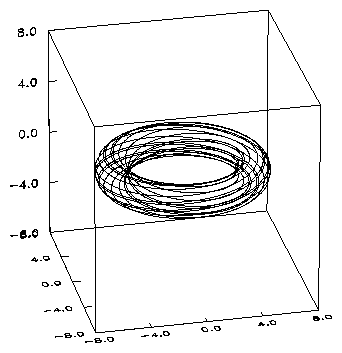
This is approximately a circular orbit shifted by a distance
∆:
Figure 2.12: Shifted, approximately circular orbit
Substitute for vd
| |
|
| | (2.69) |
| |
|
| | (2.70) |
| |
|
| ∆ = |
mv||
q Bθ
|
|
r0
R
|
= rLθ |
r0
R
|
, |
| | (2.71) |
|
where rLθ is the Larmor Radius in a field Bθ ×r / R.
Provided ∆ is small, particles will be confined.
Obviously the important thing is the poloidal rotation of the field
lines: Rotational Transform.
Rotational Transform
| |
|
|
|
poloidal angle
1 toroidal rotation
|
|
| | (2.72) |
| |
|
|
poloidal angle
toroidal angle
|
. |
| | (2.73) |
|
(Originally, ι was used to denote the transform. Since about
1990 it has been used to denote the transform divided by 2π which
is the inverse of the safety factor.)
`Safety Factor'
|
qs = |
1
ι
|
= |
toroidal angle
poloidal angle
|
. |
| (2.74) |
Actually the value of these ratios may vary as one moves around
the magnetic field. Definition strictly requires one should
take the limit of a large no. of rotations.
qs is a topological number: number of rotations the long way
per rotation the short way.
Cylindrical approx.:
In terms of safety factor the orbit shift can be written
|
|∆| = rL θ |
r
R
|
= rL ϕ |
Bϕ r
Bθ R
|
= rL qs |
| (2.76) |
(assuming Bϕ >> Bθ).
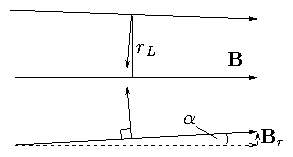
2.6 The Mirror Effect of Parallel Field Gradients:
E
= 0, ∇B ||B
Figure 2.13: Basis of parallel mirror force
In the above situation there is a net force along B.
Force is
| |
|
|
− |q v∧B| sinα = − |q |v⊥ B sinα |
| | (2.77) |
| |
|
| | (2.78) |
|
Calculate Br as function of Bz from ∇ . B
= 0.
|
∇ . B= |
1
r
|
|
∂
∂r
|
(rBr) + |
∂
∂z
|
Bz = 0 . |
| (2.79) |
Hence
Suppose rL is small enough that [(∂Bz)/(∂z)] ≅ const.
|
[ r Br]0rL ≅ − | ⌠
⌡
|
rL
0
|
r dr |
∂Bz
∂z
|
= − |
1
2
|
rL2 |
∂Bz
∂z
|
|
| (2.81) |
So
|
sinα = − |
Br
B
|
= + |
rL
2
|
|
1
B
|
|
∂Bz
∂z
|
|
| (2.83) |
Hence
|
< F|| > = − |q | |
v⊥ rL
2
|
|
∂Bz
∂z
|
= − |
B
|
|
∂Bz
∂z
|
. |
| (2.84) |
As particle enters increasing field region it experiences a
net parallel retarding force.
Define Magnetic Moment
Note this is consistent with loop current definition
|
μ = A I = πrL2 . |
|q |v⊥
2 πrL
|
= |
|q |rL v⊥
2
|
|
| (2.86) |
Force is F|| = μ . ∇|| B
This is force on a `magnetic dipole' of moment μ.
Our μ always points along B but in opposite direction.
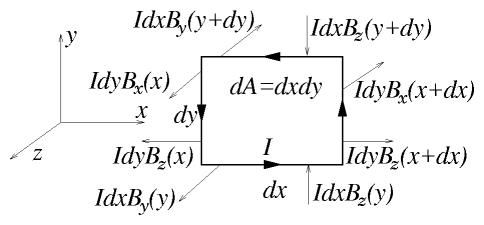
2.6.1 Force on an Elementary Magnetic Moment Circuit
Figure 2.14: Force components on an elementary
circuit constituting a magnetic dipole.
Consider a plane rectangular circuit carrying current I
having elementary area dxdy = dA. Regard this as a
vector pointing in the z direction dA.
The force on this circuit in a field B(r) is
F such that
| |
|
|
Idy [Bz (x+dx) − Bz(x)] = I dydx |
∂Bz
∂x
|
|
| | (2.88) |
| |
|
|
−I dx [Bz (y+dy) − Bz(y)] = I dydx |
∂Bz
∂y
|
|
| | (2.89) |
| |
|
|
− I dx [By (y+dy) − By(y)] − I dy[Bx(x+dx) − Bx(x)] |
| | (2.90) |
| |
|
| − I dxdy | ⎡
⎣
|
∂Bx
∂x
|
+ |
∂By
∂y
| ⎤
⎦
|
= I dydx |
∂Bz
∂z
|
|
| | (2.91) |
|
(Using ∇ . B
= 0).
Hence, summarizing: F = I dydx ∇ Bz.
Now define μ = I dA = I dydx ∧z and
take it constant. Then clearly the force can be written
|
F = ∇ (B. μ ) [ Strictly = (∇ B) . μ] |
| (2.92) |
μ is the (vector) magnetic moment of the circuit.
The shape of the circuit does not matter since any circuit
can be considered to be composed of the sum of many
rectangular circuits. So in general
and force is
|
F = ∇ (B. μ) (μ constant), |
| (2.94) |
We shall show in a moment that |μ | is constant
for a circulating particle, regarded as an elementary circuit.
Also, μ for a particle always points in the -B direction.
[Note that this means that the effect of particles on the field
is to decrease it.] Hence the force may be written
This gives us both:
- Magnetic Mirror Force:
and
- Grad B Drift:
|
v∇B = |
1
q
|
|
F ∧B
B2
|
= |
μ
q
|
|
B∧∇ B
B2
|
. |
| (2.97) |
2.6.2 μ is a constant of the motion
`Adiabatic Invariant'
Proof from F||
Parallel equation of motion
|
m |
dv||
dt
|
= F|| = − μ |
dB
dz
|
|
| (2.98) |
So
|
m v|| |
dv||
dt
|
= |
d
dt
|
( |
1
2
|
m v||2 ) = − μvz |
dB
dz
|
= − μ |
dB
dt
|
|
| (2.99) |
or
|
|
d
dt
|
( |
1
2
|
m v||2) + μ |
dB
dt
|
= 0 . |
| (2.100) |
Conservation of Total KE
| |
|
|
|
d
dt
|
( |
1
2
|
mv||2 + |
1
2
|
mv⊥2 ) = 0 |
| | (2.101) |
| |
|
|
d
dt
|
( |
1
2
|
mv||2 + μB) = 0 |
| | (2.102) |
|
Combine
Angular Momentum
of particle about the guiding center is
| |
|
|
|
mv⊥
|q |B
|
m v⊥ = |
2m
|q |
|
|
B
|
|
| | (2.105) |
| |
|
| | (2.106) |
|
Conservation of magnetic moment is basically conservation of angular
momentum
about the guiding center.
Proof direct from Angular Momentum
Consider angular momentum about G.C. Because θ is ignorable
(locally)
Canonical angular momentum is conserved.
|
p = [ r ∧( m v+ q A) ]z conserved. |
| (2.107) |
Here A is the vector potential such that
B
= ∇ ∧A
the definition of the vector potential means that
| |
|
| | (2.108) |
| |
|
| ⌠
⌡
|
rL
0
|
r . Bz dr = |
rL2
2
|
Bz = |
μm
|q |
|
|
| | (2.109) |
|
Hence
| |
|
|
|
− q
|q |
|
rL v⊥ m + q |
mμ
|q|
|
|
| | (2.110) |
| |
|
| | (2.111) |
|
So p = const ↔ μ = constant.
Conservation of μ is basically conservation of angular momentum of
particle about G.C.
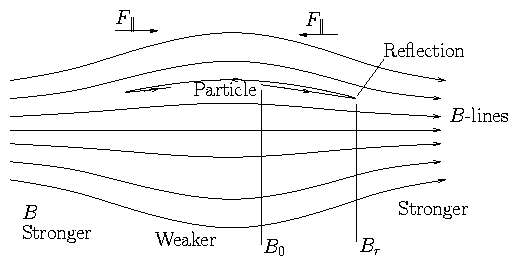
2.6.3 Mirror Trapping
Figure 2.15: Magnetic Mirror
F|| may be enough to reflect particles back. But may not!
Let's calculate whether it will:
Suppose reflection occurs.
At reflection point v||r = 0.
Energy conservation
|
|
1
2
|
m (v⊥02 + v||02) = |
1
2
|
m v⊥r2 |
| (2.112) |
μ conservation
Hence
Pitch Angle θ
| |
|
| | (2.116) |
| |
|
|
v⊥02
v⊥02 +v||02
|
= sin2 θ0 |
| | (2.117) |
|
So, given a pitch angle θ0, reflection takes place where
B0/Br = sin2θ0.
If θ0 is too small no reflection can occur.
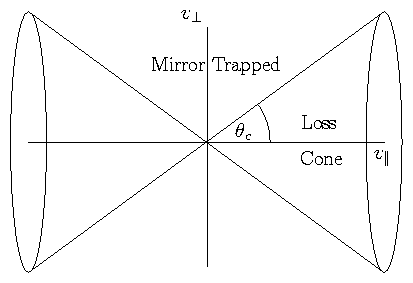
Critical angle θc is obviously
Loss Cone is all θ < θc.
Figure 2.16: Critical angle θc divides
velocity space into a loss-cone and a region of mirror-trapping
Importance of Mirror Ratio: Rm = B1 / B0.
2.6.4 Other Features of Mirror Motions
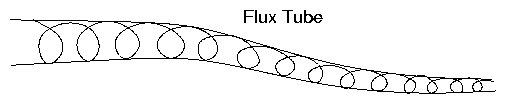
Flux enclosed by gyro orbit is constant.
Figure 2.17: Flux tube described by orbit
Note that if B changes `suddenly' μ might not be conserved.
Basic requirement
Slow variation of B (relative to rL).
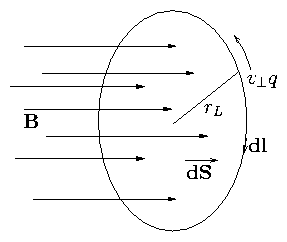
2.7 Time Varying B Field (E inductive)
Figure 2.18: Particle orbits round B so as to
perform a line integral of the Electric field
Particle can gain energy from the inductive E field
| |
|
| | (2.123) |
| |
|
| − | ⌠
⌡
|
s
|
|
⋅
B
|
. ds = − |
d Φ
d t
|
|
| | (2.124) |
|
Hence work done on particle in 1 revolution is
|
δw = − | ⌠
(⎜)
⌡
| |q|E. dl = + |q | | ⌠
⌡
|
s
|
|
⋅
B
|
. ds = + |q | |
d Φ
dt
|
= |q | |
⋅
B
|
πrL2 |
| (2.125) |
(dl and v⊥ q are in
opposition directions).
Hence
|
|
d
dt
|
| ⎛
⎝
|
1
2
|
m v⊥2 | ⎞
⎠
|
= |
|Ω|
2 π
|
δ | ⎛
⎝
|
1
2
|
mv⊥2 | ⎞
⎠
|
= μ |
dB
dt
|
|
| (2.128) |
but also
|
|
d
dt
|
| ⎛
⎝
|
1
2
|
mv⊥2 | ⎞
⎠
|
= |
d
dt
|
( μB ) . |
| (2.129) |
Hence
Notice that since Φ = [(2 πm)/(q2 )] μ,
this is just another way of saying
that the flux through the gyro orbit is conserved.
Notice also energy increase.
Method of `heating'. Adiabatic Compression.
2.8 Time Varying E-field (E, B uniform)
Recall the E∧B drift:
when E varies so does vE ∧B. Thus the guiding centre
experiences an acceleration
|
|
⋅
v
|
E ∧B
|
= |
d
dt
|
| ⎛
⎝
|
E∧B
B2
| ⎞
⎠
|
|
| (2.132) |
In the frame of the guiding centre which is accelerating, a force is
felt.
|
Fa = − m |
d
dt
|
| ⎛
⎝
|
E∧B
B2
| ⎞
⎠
|
(Pushed back into seat! −ve.) |
| (2.133) |
This force produces another drift
| |
|
|
|
1
q
|
|
Fa ∧B
B2
|
= − |
m
qB2
|
|
d
dt
|
| ⎛
⎝
|
E∧B
B2
| ⎞
⎠
|
∧B |
| | (2.134) |
| |
|
|
− |
m
qB2
|
|
d
dt
|
| ⎛
⎝
| ⎛
⎝
|
E. |
^
b
| ⎞
⎠
|
|
^
b
|
−E | ⎞
⎠
|
|
| | (2.135) |
| |
|
| | (2.136) |
|
This is called the `polarization drift'.
| |
|
|
vp = |
E∧B
B2
|
+ |
m
q B2
|
|
⋅
E
|
⊥
|
|
| | (2.137) |
| |
|
| | (2.138) |
|
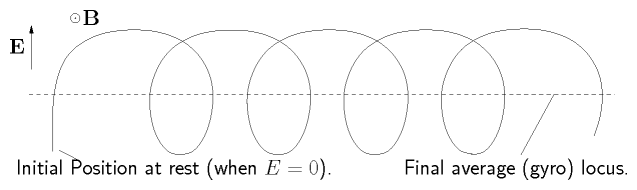
Figure 2.19: Suddenly turning on an electric
field causes a shift of the gyrocenter in the direction of force. This
is the polarization drift.
Start-up effect:
When we `switch on' an electric field the average position (gyro
center) of
an initially stationary particle shifts over by ∼ 1/2 the
orbit
size. The polarization drift is this polarization effect on the
medium.
Total shift due to vp is
|
∆r = | ⌠
⌡
|
vp dt = |
m
q B2
|
| ⌠
⌡
|
|
^
E
|
⊥
|
dt = |
m
q B2
|
[ ∆E⊥ ] . |
| (2.139) |
2.8.1 Direct Derivation of [(dE)/dt] effect:
`Polarization Drift'
Consider an oscillatory field E
= Ee−iωt (⊥r0B)
Try for a solution in the form
where, as usual, vL satisfies m · vL = q vL ∧B
Then
|
(1) m(−i ωvD) = q ( E+ vD ∧B) ×e−i ωt |
| (2.143) |
Solve for vD: Take ∧B this equation:
|
(2) − m i ω( vD ∧B) = q ( E∧B+ ( B. vD ) B−B2 vD ) |
| (2.144) |
add m i ω×(1) to q ×(2) to eliminate
vD ∧B.
|
m2 ω2 vD + q2 ( E∧B− B2 vD ) = mi ωq E |
| (2.145) |
|
or: vD | ⎡
⎣
|
1 − |
m2 ω2
q2 B2
| ⎤
⎦
|
= − |
miω
qB2
|
E+ |
E∧B
B2
|
|
| (2.146) |
|
i.e. vD | ⎡
⎣
|
1 − |
ω2
Ω2
| ⎤
⎦
|
= − |
iωq
ΩB |q |
|
E+ |
E∧ B
B2
|
|
| (2.147) |
Since −iω↔ [(∂)/(∂t)] this is
the
same formula as we had before: the sum of polarization and E∧B drifts except for the [1 − ω2/Ω2] term.
This term comes from the change in vD with time (accel).
Thus our earlier expression was only approximate. A good approx
if ω << Ω.
2.9 Non Uniform E (Finite Larmor Radius)
|
m |
dv
dt
|
= q ( E(r) + v∧B) |
| (2.148) |
Seek the usual solution v
= vD + vL.
Then average out over a gyro orbit
Hence drift is obviously
So we just need to find the average E field experienced.
Expand E as a Taylor series about the G.C.
|
E(r) = E0 +( r. ∇) E+ | ⎛
⎝
|
x2∂2
2!∂x2
|
+ |
y2
2!
|
|
∂2
∂y2
| ⎞
⎠
|
E+ cross terms + . |
| (2.152) |
(E.g. cross terms are x y [(∂2)/(∂x ∂y)]E).
Average over a gyro orbit: r = rL (cosθ, sinθ,0).
Average of cross terms = 0.
Then
|
〈E(r) 〉 = E+ ( 〈rL 〉. ∇) E+ |
〈rL2〉
2!
|
∇2 E. |
| (2.153) |
linear term 〈rL〉 = 0. So
Hence E∧B with 1st finite-Larmor-radius correction
is
|
vE ∧B = | ⎛
⎝
|
1 + |
rL2
4
|
∇2 | ⎞
⎠
|
|
E∧B
B2
|
. |
| (2.155) |
[Note: Grad B drift is a finite Larmor effect already.]
Second and Third Adiabatic Invariants
There are additional approximately conserved quantities like μ
in some geometries.
2.10 Summary of Drifts
| |
|
| | (2.156) |
| |
|
|
|
1
q
|
|
F ∧B
B2
|
General Force |
| | (2.157) |
| |
|
|
| ⎛
⎝
|
1 + |
rL2
4
|
∇2 | ⎞
⎠
|
|
E∧B
B2
|
Nonuniform E |
| | (2.158) |
| |
|
| | (2.159) |
| |
|
|
|
mv||2
q
|
|
Rc ∧B
Rc2 B2
|
Curvature |
| | (2.160) |
| |
|
|
|
1
q
|
| ⎛
⎝
|
mv||2 + |
1
2
|
m v⊥2 | ⎞
⎠
|
|
Rc ∧B
Rc2 B2
|
Vacuum Fields. |
| | (2.161) |
| |
|
| | (2.162) |
|
Mirror Motion
Force is F = − μ∇B.